
Robot mapping in GPS denied environment
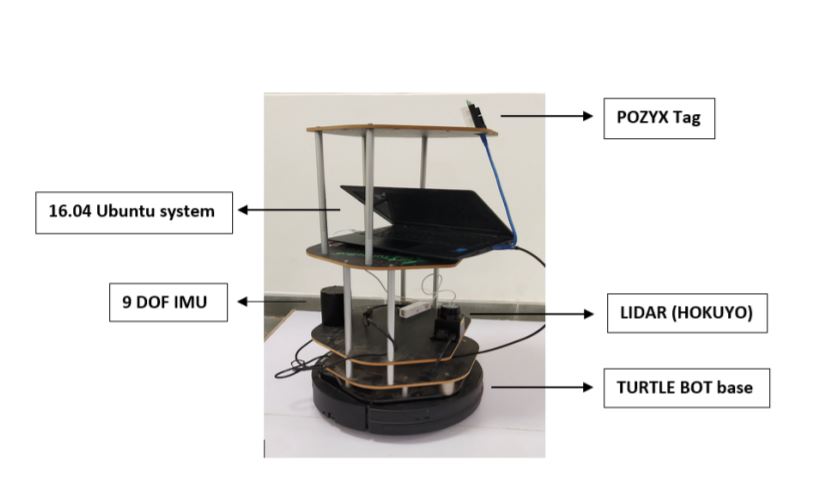
The problem statement of this project was to map environment using robots in the GPS denied environments. Also, instead of traditional encoder based methods to localize we used a bluetooth based IPU to localize the robot and then interface with a LIDAR and a IMU to develop a map using probablistic approaches.
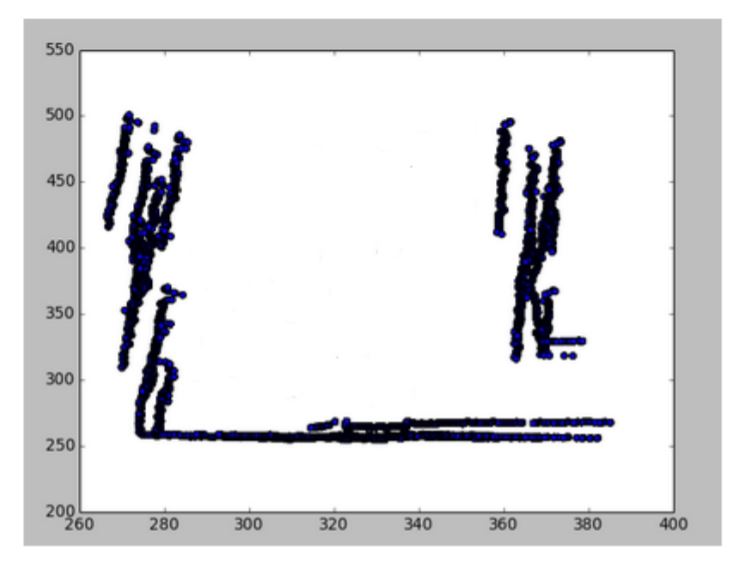
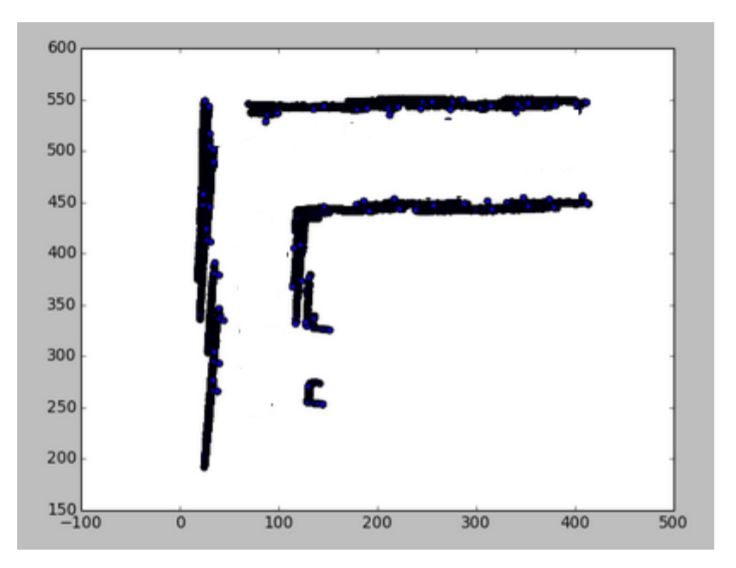
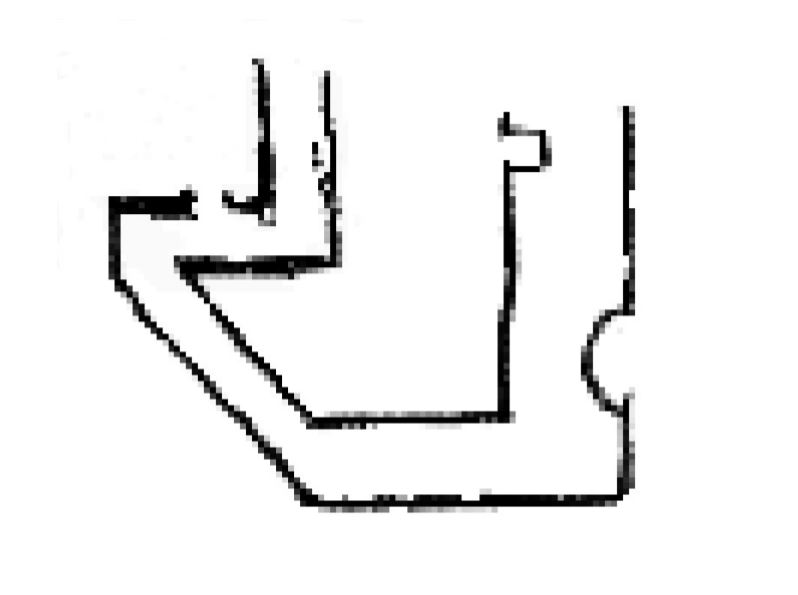
The map thus obtained would then be used to navigate in unknown indoor environments by robots. Its an ongoing research project at Inspire Labs and you can see a few of the maps obtained in the images above.