
Quadcopter Control Model
Advanced MATLAB/Simulink simulation for quadcopter control in crash scenarios and high sensor noise environments.

Project Gallery
Visual documentation of the quadcopter control model and simulation results

Project Details
Timeline
2020 Academic Year
Category
Control Systems & Simulation
Technologies
Tags
Project Overview
This team project focused on developing a comprehensive quadcopter control model using MATLAB and Simulink. The goal was to create a robust control system capable of handling real-world challenges such as sensor noise, system failures, and crash scenarios.
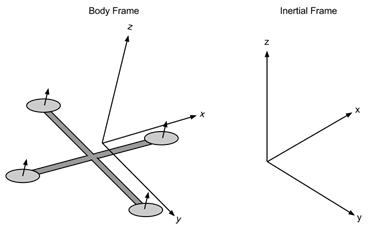
System Modeling
We developed both dynamic and kinematic models for the quadcopter system, capturing the complex interactions between the four rotors, airframe dynamics, and environmental factors. The mathematical model included:
- 6-DOF rigid body dynamics
- Rotor thrust and torque modeling
- Aerodynamic effects and drag forces
- Sensor noise and measurement uncertainties
Trajectory Planning
Implemented minimum jerk trajectory planning to ensure smooth and efficient flight paths between waypoints. This approach minimized sudden accelerations and provided optimal control inputs for the quadcopter's flight controller.
Key Innovation: Robust Control Design
The control system was specifically designed to handle high sensor noise and crash scenarios. We implemented adaptive control algorithms that could maintain stability even when sensor readings were unreliable or when the quadcopter experienced partial system failures.
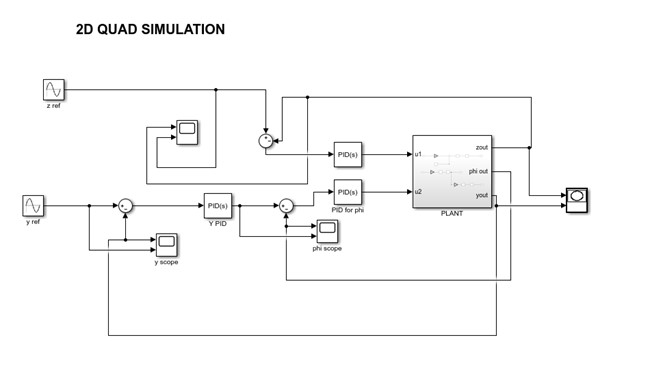
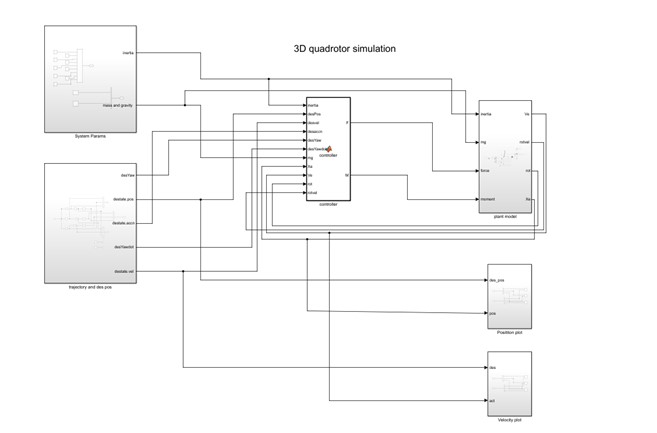
Simulation Environment
Created a comprehensive simulation environment in Simulink that included:
- Realistic sensor noise models
- Environmental disturbances (wind, turbulence)
- System failure scenarios
- Crash detection and recovery algorithms
- 3D visualization of flight paths
Testing and Validation
The model was extensively tested under various challenging conditions:
- High Sensor Noise: Simulated degraded sensor performance
- Crash Scenarios: Tested recovery from partial system failures
- Environmental Challenges: Wind gusts and turbulence
- Waypoint Navigation: Complex 3D trajectory following
Results and Performance
The control system successfully demonstrated robust performance in challenging conditions. Key achievements included:
- Stable flight control under 30% sensor noise
- Successful recovery from simulated crash scenarios
- Accurate waypoint navigation with minimal tracking error
- Smooth trajectory execution with minimum jerk profiles
View the complete project: Matlab-Quadcopter-simulation